

近几年汽车行业关于EEA的讨论一直热度不减,各大整车企业也纷纷宣布推出域集中、区域集中乃至中央集中式的EEA。EEA是电子电气架构(Electrical/Electronic Architecture)的英文名称缩写,这个概念最早出现在汽车从完全机械化产品向电气化、电子化发展之时。然而到了电动化、网联化、智能化的今天,“架构”一词的外延更加丰富,“电子电气”又关联广泛,EEA常常与芯片、软件、网络、线束、电子电气硬件等概念一起出现,实际上出现不少问题,真的有必要对EEA进行系统清晰的梳理。或许正是因为相关话题中混杂了太多的细节,一些企业高层对于EEA的理解与认知也缺乏战略高度,导致企业对于集中式EEA的落地规划陷入了误区。为了助力行业形成共识、加快智能汽车EEA的发展演进,盖斯特咨询研究团队围绕大家最关注的以下8个EEA问题,分享我们对于EEA最新发展趋势的系统研究和深度思考。
✔ 从传统汽车到智能汽车,EEA的内涵发生了什么变化?
✔ EEA包含哪些关键要素?EEA在智能汽车技术全景图中的定位是什么?
✔ EEA对于智能汽车具有什么作用和意义?
✔ EEA的总体发展趋势是什么?
✔ EEA的评价维度有哪些?
✔ EEA的演进将分成几个阶段?
✔ 集中式EEA演进着面临哪些挑战?
✔ 整车企业如何推动集中式EEA的落地?
一、从传统汽车到智能汽车,EEA的内涵发生了什么变化?
1.EEA的概念定义
首先从基本概念上,EEA就是电子电气器件的架构,体现了整车电子电气器件之间的连接关系。广义上EEA包含器件及其连接关系。我们可以进一步把EEA分为“电子架构”和“电气架构”,它们分别承载整车信息和能量的流动。
其中,“电子器件”一般指供电电压小于/等于48伏、基于电子电路实现相关功能的低压/弱电设备,包括车载传感器、芯片、显示屏等,主要负责完成信息/数据的采集、处理与利用。“电子架构”负责整车电子器件之间的信息交互,决定了电子器件的连接关系。这种连接关系通常用“网络拓扑”来表示,即以连接各种电子器件的通信线束所构成的通信网络的物理空间布局,因此“电子架构”也可以称为“通信架构”和“网络架构”。
“电气器件”一般指供电电压高于48伏的高压/强电设备,包括电池、电驱等,主要负责完成能量的转换。“电气架构”负责整车用电设备(包括高压和低压)的供电配电,并决定了电气器件的连接关系。这种连接关系通常用“电气拓扑”来表示,即连接各种电气器件所用的电气线缆的物理空间布局。
此外还需要注意以下几点:第一,虽然电子器件的供电配电也是由电气架构负责,但是电子器件之间不涉及能量的流转,因此电气架构对其连接关系不起决定性作用;第二,电子架构和电气架构是两套完全不同的拓扑结构,即使在物理空间上存在某些重合,但实际用到的线束/线缆是不同的;第三,电气架构中的高压和低压的供配电并非完全独立,一方面,低压供配电的能量是通过高压电源变压而来;另一方面,部分电子器件与电气器件在物理空间上会集成在一起,比如电驱总成内集成一个ECU(电子控制单元),因此高压和低压会同时存在于某些零部件。
2.EEA的内涵变化
具体到EEA的内涵,从传统汽车发展到智能汽车的变化非常大。笔者将EEA的内涵划分为物理连接关系、计算通信架构和能量配给平台三个层面,其中计算通信架构包括计算节点和通信网络,能量配给平台又可以区分为低压平台和高压平台。EEA的内涵在各个层面的变化如图1所示。
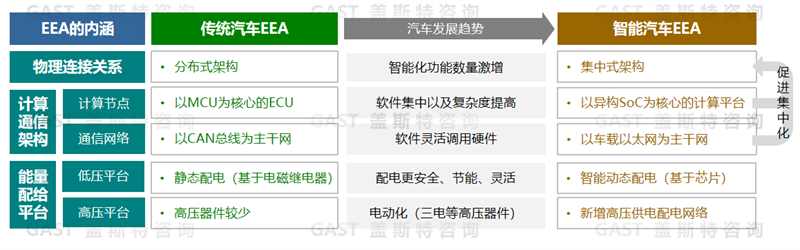
图1传统汽车EEA与智能汽车EEA的差异
在物理连接关系层面,传统汽车EEA采用分布式架构,电子控制设备(通常是ECU)分布在各功能子系统/模块中。随着智能化带来的功能数量激增,如果继续沿用分布式架构将导致ECU数量越来越多、布线愈发复杂,使得架构难以持续拓展。因此,智能汽车EEA将向集中式架构发展,即将各功能子系统/模块交由集中式电子器件(比如计算平台或域控制器)统一控制,从而简化硬件的物理空间布局、连接与布线。
在计算通信架构层面,传统汽车EEA采用以MCU(微控制单元)为核心、以ECU作为计算节点、以CAN总线(控制器局域网总线)作为通信网络的主干网,实现是面向各ECU信号的通信。随着智能化带来的软件集中与复杂度提高,汽车需要更大的算力来支撑软件运行,因此以异构SoC(系统级芯片)为核心的计算平台将成为主要的计算节点。此外,智能汽车要求软件能够灵活调用硬件,这需要更大的通信带宽和更灵活的通信机制,因此车载以太网将成为新的主干网,支撑上层实现面向服务的通信。计算节点和通信网络的升级也将反过来进一步促进EEA的集中化。
在能量配给平台层面,传统汽车由于高压器件较少,主要采用基于蓄电池的低压供电以及基于电磁继电器的静态配电。而电动化作为智能化的有力支撑,动力电池、电驱等三电及其附带的高压器件均会搭载在智能汽车上,智能汽车EEA也将新增高压供电配电网络。此外,智能化也要求低压平台采取更加安全、节能和灵活的电源管理策略,这需要基于芯片实现智能动态配电。
二、EEA包含哪些关键要素?EEA在智能汽车技术全景图中的定位是什么?
对于智能汽车而言,EEA在“能量配给平台”层面的内涵并非重点,因此在大部分语境中,狭义上的EEA通常指的是电子器件的连接关系,即通信网络。而广义上的EEA则包含“计算通信架构”中的所有电子电气器件及其连接关系,为汽车软件提供基础能力支撑与可供调用的硬件资源来源。考虑到狭义EEA可谈论的内容有限,本文后续内容主要讨论广义EEA。
图2展示了EEA在智能汽车技术架构中所处的位置、构成要素,以及其与其他要素之间的关系。可以看出,EEA既是软件运行与交互的支撑,又是硬件接入与集成的平台。
EEA构成要素之一是传感器、执行器等功能硬件,它们通过硬件接口和线束接入整车通信网络。这些硬件所提供的功能性能是实现整车体验的基础能力。在软硬解耦趋势下,未来功能硬件的相关控制模型将实现知识化、抽象化,从而允许通过软件将硬件功能封装成为基础服务单元,支撑构建上层SOA(面向服务的架构)。
EEA构成要素之二是计算平台/控制器,它们是所有车载软件最终部署的地方,通过提供计算与存储资源来支撑软件的运行。计算平台/控制器的数量可以是一个或多个,这既与车载软件的集中程度有关,又与芯片技术的发展有关,具体将在后文详细介绍。
EEA构成要素之三是通信网络,主要负责硬件的连接与信号的传输。首先,通信网络需要建立不同计算平台之间的连接,从而支持跨域/跨平台的软件交互;其次,通信网络需要建立功能硬件与计算平台之间的连接,从而支持部署在计算平台上的软件能够灵活调用底层功能硬件;最后,通信网络需要提供以太网等硬件层通信协议,从而支撑上层复杂的软件层协议,比如实现SOA所必需的面向服务的通信。
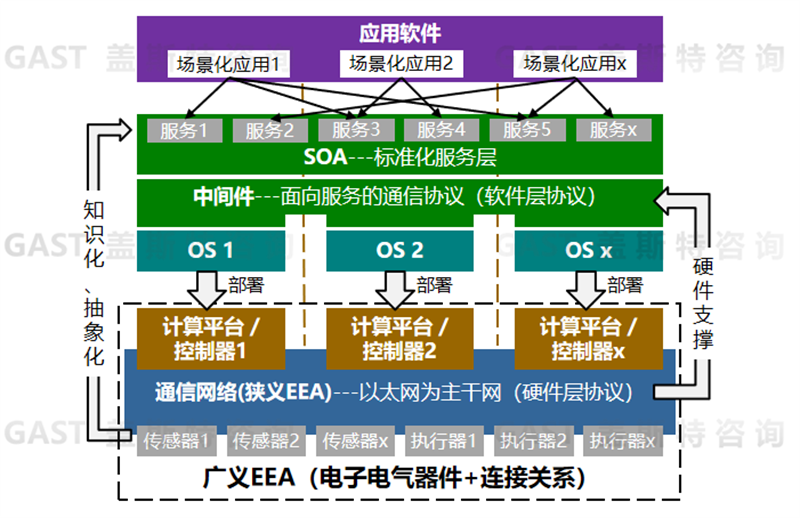
图2智能汽车技术架构
三、EEA在智能汽车具有什么作用和意义?
笔者此前的微信文章《“新汽车”SOA发展趋势与实施策略研究》中曾经提到,智能汽车中软硬解耦趋势本质上就是逻辑与物理分离的过程,而软件架构决定逻辑连接关系,EEA决定物理连接,两者是灵魂和躯体的协同共生关系。
如果把整车架构设计类比为城市规划,那么以SOA为代表的软件架构对应一种特殊的城市运行机制,EEA则对应城市总体布局。下面根据“软件先行”的SOA架构设计流程,说明SOA与EEA之间的紧密联系,以及EEA对于智能汽车的重要意义:
第一,EEA决定了整车软件在硬件上的部署。设计SOA的第一步是进行服务的划分与定义,即确定服务集合、服务颗粒度、服务功能性能,类似于城市规划中明确城市的正常运转需要具备哪些功能;而设计EEA时就需要考虑为每种服务提供必要的底层硬件支撑,包括传感器、执行器、计算、存储、通信带宽等资源,类比城市规划就是明确承担城市各功能的建筑物以及配套设施。
第二,EEA不仅影响整车功能的横向打通,还影响企业内部研发组织的横向划分。设计SOA的第二步是明确服务之间的打通交互关系,类比城市规划就是使城市功能实现充分协同;理想情况下SOA的服务之间能够彼此相互打通、灵活访问,但这受限于EEA的集中程度,比如部署在同一域控制器上的软件往往比跨硬件的软件更容易打通,类比城市规划就是只有城市形成集群才能实现更充分的协同,而不同的城市集群又需要不同的管理组织。
第三,EEA为软件的灵活交互提供了通信的硬件支撑。设计SOA的第三步是定义服务之间的通信规则,不同服务之间的通信规则是不同的,就好比城市中的物流运输网络和医疗急救转运网络需要不同的运营调度机制;但软件层面不论设计规则如何,服务交互最终都要转化为EEA中通信线束上的物理信号,就好比无论是物流车还是救护车都必须跑在交通道路上。
第四,EEA的设计决定软件复杂度的上限,也影响外部功能生态的接入。设计SOA的第四步需要从可拓展性的角度对架构进行优化,类似在城市规划中经常强调城市功能的多元化与转型升级;但就像城市的土地空间资源都是有限的,EEA提供的算力、通信带宽、硬件接口等硬件资源也是有限的,只有做好相应的预留才能支持软件的灵活拓展和升级,因此EEA的设计对于外部功能生态的接入以及车载软件复杂度的上限都有决定性影响。
第五,EEA支持硬件的平台化设计、硬件的灵活替换与升级。设计SOA的第五步是对架构进行跨车型、跨平台、跨硬件适配,即强调架构的复用性,就好比北京和上海虽然是不同的城市,但在整体的城市运行机制上有很大一部分的机制相似;但这种相似是建立在城市建设中存在很多国家标准规范的基础上,对于EEA来说就是要实现硬件接口的标准化,因此可以说EEA支持着硬件的平台化设计以及可插拔式替换与升级。
综上所述,EEA为整车的设计开发提供了物理层面的“总体布局”,同时影响着硬件、软件以及企业组织,所以EEA和SOA都是智能汽车设计开发中首要考虑的关键要素。
四、EEA的总体发展趋势是什么?
汽车智能化发展驱动汽车软硬解耦,解耦后的软件和硬件分别在逻辑维度和物理维度上集中,因此需要更高性能、更低成本、更加灵活的EEA。所以在讨论EEA的发展方向之前,首先要了解智能汽车的发展趋势与需求,笔者将其归纳为三点:一是,智能化时代技术发展快,用户需求变化也快,导致汽车产品开发迭代的周期也必须加快;二是,智能化功能需求呈现多样化,导致汽车上硬件的种类与数量增多;三是,用户更加追求整体体验,要求汽车上功能之间的协同要增加,导致功能逻辑的设计越来越复杂。以上每一个趋势都对整车EEA提出全新的需求。
第一,产品开发迭代加速,意味着传统的软硬件绑定的开发模式必然走向没落,取而代之的是软硬解耦,让软件能够脱离硬件实现更快的迭代,这对应到EEA层面即前文所述的逻辑与物理分离。
第二,分布在物理空间中的硬件越多,意味着车上的线束连接越多、拓扑结构越复杂,而要避免车内空间的限制,就需要将原本由多个ECU承担的功能集中至一个或几个具备大算力的域控制器或计算平台上,并使得传感器和执行器尽可能就近接入,即所谓的物理集中。
第三,功能逻辑设计越复杂,意味着负责实现这些逻辑策略对硬件进行控制和调用的软件需要更复杂的结构、更多的组件,而要降低软件的开发难度,就要将原本针对特定硬件、采用不同软件系统的多个逻辑策略集中至一个软件系统内重新设计开发(比如SOA),即所谓的逻辑集中。
因此,汽车EEA的演进趋势可以归纳为“集中化”,并且是分别从逻辑和物理两个维度实现集中。
五、智能汽车EEA的评价维度有哪些?
优秀的智能汽车EEA应具备三个属性:高性能(支撑更复杂的软件更好更快地运行)、灵活可拓展(支持产品在更长的周期中持续进化)、合适的成本(有利于整体研发和制造的成本控制)。EEA的集中化恰好能够在这三个维度都实现优化。
从性能维度看,逻辑集中通过让软件在一个系统内充分共享数据,甚至部分软件可以进行合并融合,使得软件的运行与交互效率都更高;物理集中通过提高算力,能够处理更多的数据、支撑更复杂的功能。
从灵活性维度看,逻辑集中后通过对软件系统进行SOA设计,使得软件高内聚、低耦合、灵活访问,允许对软件组件(服务)进行灵活升级以及往架构中灵活增加新组件;物理集中则留出了更多的布置空间,支持更多传感器和执行器的灵活接入。
从成本维度看,逻辑集中后通过对软件系统进行SOA设计,使得软件组件的复用性增强,避免了重复性开发,降低了研发成本;物理集中通过减少硬件数量与算力冗余降低了控制器的物料成本,另外通过简化网络拓扑结构,使得线束的成本与重量都得到了降低。
未完待续,请继续关注《盖斯特研报:智能汽车EEA最新发展趋势与实施策略研究(下篇)》